I’m Runya Liu, a senior student majoring applied mathematics and computational science. I love travelling and music.
Signature Work Project Overview
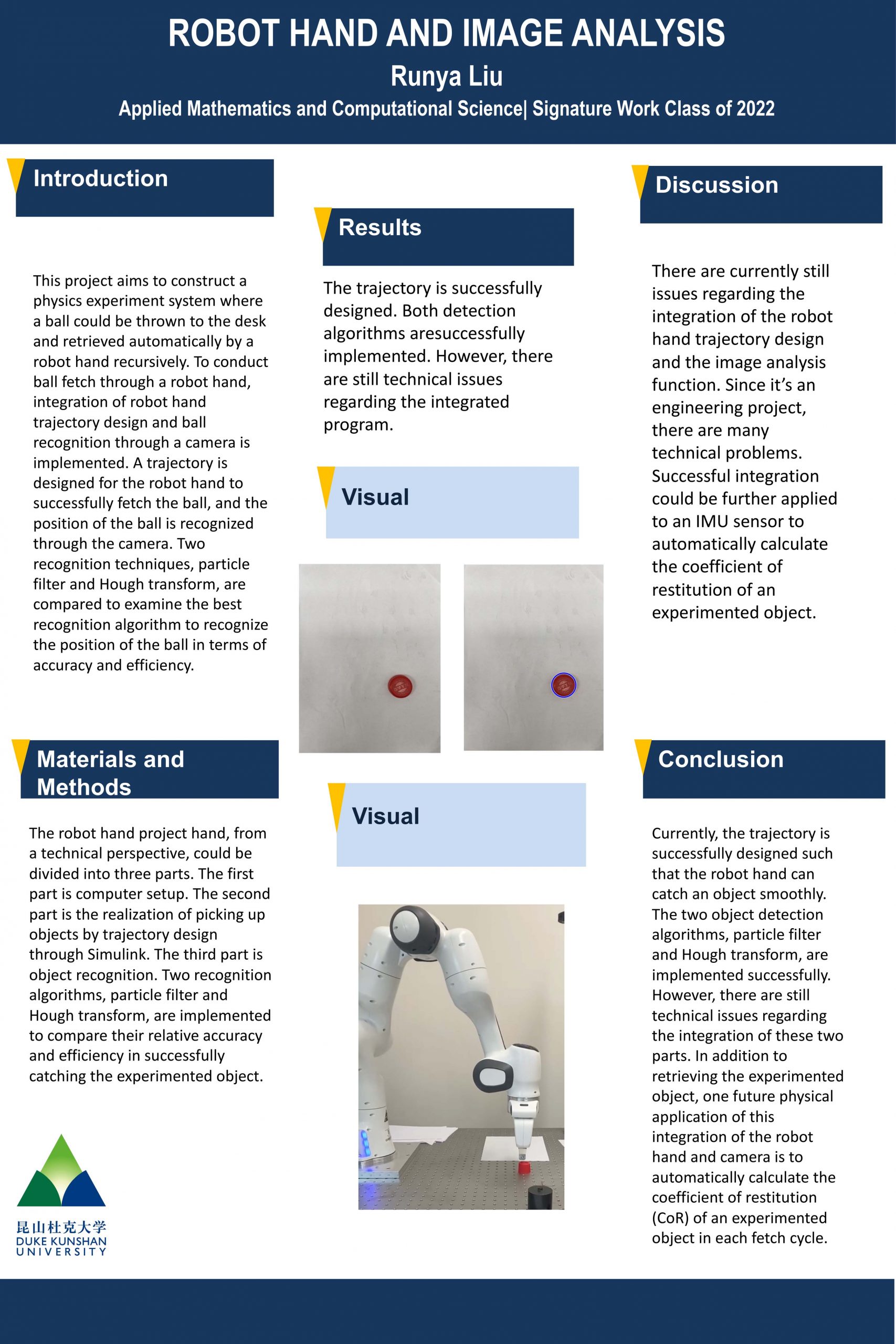
This project aims to construct a physics experiment system where a ball could be thrown to the desk and retrieved automatically by a robot hand recursively. To conduct ball fetch through a robot hand, integration of robot hand trajectory design and ball recognition through a camera is implemented. A trajectory is designed for the robot hand to successfully fetch the ball, and the position of the ball is recognized through the camera. Two recognition techniques, particle filter and Hough transform, are compared to examine the best recognition algorithm to recognize the position of the ball in terms of accuracy and efficiency. One future physical application of this integration of the robot hand and camera is to automatically calculate the coefficient of restitution (CoR) of an experimented object in each fetch cycle.